第四章 机械中的摩擦和机械效率
基本要求
清楚研究机械中的摩擦和机械效率的目的。熟练掌握
下列内容:运动副中的摩擦(包括平面、槽面、矩形螺旋,
三角螺旋和回转副);有摩擦时的机构受力分析;机械效
率和机械自锁的分析和计算。
基本概念题与答案
简答题
1.移动副中的摩擦分几种情况?写出其水平驱动力与铅垂载荷之间的关系式。
答:分四种:
(1)平面摩擦 P = Q tg φ, tg φ = f 。
(2)斜平面摩擦 P = Q tg (α + φ)。
(3)平槽面摩擦 P = Q tg φv, tg φv = fv = f / sinθ,θ为槽形半角, φv 、 fv 分别为当量摩擦角、当量摩擦系数。
(4)斜槽面摩擦 P = Q tg (α + φv)。
2.螺旋副中的摩擦有几种,水平驱动力和铅垂载荷关系如何?
答:有两种:
(1)矩形螺纹P = Q tg (α + φ),M = Pd2 / 2。
(2)三角螺纹P = Q tg (α + φv),M = Pd2 / 2,φv = arc tg fv ,fv = f / cosβ,β为牙形半角。
3.转动副中的摩擦分几种情况,摩擦力或摩擦力矩公式如何?
答:分两种:
(1) 轴颈摩擦
Fv = fv Q 式中的 fv 是转动副的当量摩擦系数。Mf = ρR21 = r fv Q = ρQ,ρ= r fv 。
(2)轴端摩擦(没讲)
4.移动副和转动副中总反力的确定方法是什么?
答:移动副:R21 与V12 成 900 + φ 。转动副:R21 对摩擦圆中心力矩方向与ω12 转向相反并切于摩擦圆。摩擦圆半径 ρ= r fv ,fv = (1 — 1.5)f 。
5.考虑摩擦时,机构进行受力分析的方法是什么?
答:(1)根据给定的轴颈和摩擦系数画出各转动副的摩擦圆。
(2)确定运动副中的总反力。首先要确定移动副或滑动摩擦的平面高副的总反力,再根据已知条件或二力杆及二力杆受力状态来确定转动副的总反力。
(3)取原动件、杆组为分离体,由力平衡条件求出各运动副的总反力的大小和平衡力和平衡力距。
6.什么是机械效率?考虑摩擦时和理想状态机械效率有何不同?
答:机械稳定转动时的一个能量循环过程中,输功出与输入功的比值称为机械效率。考虑摩擦时机械效率总是小于1 ,而理想状态下的机械效率等于1 。
7.机械效率用力和力矩的表达式是什么?
理想驱动力(或力矩) 实际工作阻力(或力矩)
答: η = ——————————— = ———————————
实际驱动力(或力矩) 理想 工作阻力(或力矩)
8.串联机组的机械效率如何计算?
答:等于各个单机机械效率的乘积。
9.什么是机械的自锁?自锁与死点位置有什么区别?
答:自锁:因为存在摩擦,当驱动力增加到无穷时,也无法使机械运动起来的这种现象。
区别;死点位置不是存在摩擦而产生的,而是机构的传动角等于零。自锁是在任何位置都不能动,死点只是传动角等于零的位置不动,其余位置可动。
10.判定机械自锁的方法有几种?
答:(1)平面摩擦:驱动力作用在摩擦角内。
(2)转动副摩擦:驱动力作用在摩擦圆内。
(3)机械效率小于等于零(串联机组中有一个效率小于等于零就自锁)。
(4)生产阻力小于等于零。
模拟试题与答案
填空题
1、移动副的自锁条件是 β<φ ;
转动副的自锁条件是 α≤ρ ;
螺旋副的自锁条件是 λ≤φ 。
2、机械传动中,V带比平带应用广泛,从摩擦的角度来看,主要原因是 V带为槽面摩擦,fv大 。
3、普通螺纹的摩擦 大于 矩形螺纹的摩擦,因此,前者多用于 紧固联接 (传动、紧固联接)。
4、由若干机器并联构成的机组中,若其单机效率各不相同,其最高、最低效率分别为ηmax,ηmin,则机组的效率η为 (D) 。
(A)η<ηmin
(B)η≥ηmax
(C)ηmin≤η≤ηmax
(D)ηmin>η>ηmax
5、影响当量摩擦系数的因素有 接触面间的摩擦系数f和接触面的几何形状 。
图解计算题
一、(共12分)已知滑块 2 在主动力 P 作用下,克服沿斜面向下的工作 Q ,沿斜面向上匀速滑动(α = 300 )。如图所示,主动力 P 与水平方向夹角为 β = 150 ,接触面之间的摩擦角φ = 100 。
(1)用多边形法求出主动力 P 与工作 Q 之间的数学关系式;(注意:必须列出力平衡方程,画出相应的力多边形求解,否则不给分数!)(7分)
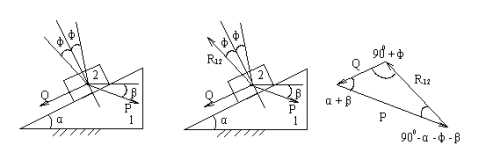 (2)为避免滑块 2 上滑时发生自锁,β所能取得的最大值应为多少?(即滑块 2 上滑时不发生自锁条件)。(5分)
(2)为避免滑块 2 上滑时发生自锁,β所能取得的最大值应为多少?(即滑块 2 上滑时不发生自锁条件)。(5分)
解:(1)滑块 2 的力平衡方程为:
→ → →
P + Q + R12 = 0 (1分)
全反力 R12 的方向如图(1分)
力三角形如图所示;(3分)
根据正弦定理: P / sin(900 + φ) = Q / sin [ 900 -(α + φ +β) ]
P = Q cosφ / cos (α + φ +β)(2分)
(2)欲使滑块向上滑时不自锁,应有工作阻力 Q > 0
即 Q = P = cos (α + φ +β)/ cosφ> 0 (2分)
则 cos(α + φ +β)> 0 ,α + φ +β< 900
β< 900 - α- φ = 900 - 300 - 100 = 500
故β角所能取得的最大值应为500 。
二、(共12分)在图示斜块机构中,已知驱动力 P = 30 N,各接触面之间的摩擦角φ及斜面与垂直方向的夹角θ如图所示。试列出斜块 1、2 的力平衡方程式,并用图解法求出所能克服的工作 Q 的大小。
[ 规定 ]:取力比例尺μP = 1 N / mm 。
解:在机构图中画出各全反力如图
其中 R12(R21)给 2 分,R31、R32 各给 1 分,(4分)
斜块 1 的力平衡方程式:
→ → →
P + R21 + R31 = 0 (2分)
斜块2的力平衡方程式:
→ → →
Q + R12 + R32 = 0 (2分)
按比例尺μP = 1 N / mm 。分别画出楔快 1、2 的力多边形如图 (3分)
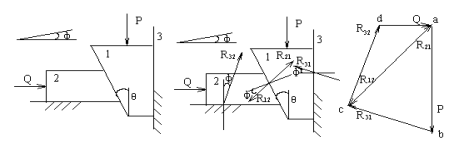 并从图中量得 da = 16.5 mm,则 Q = da μP = 16.5 × 1 = 16.5 N (1分)
并从图中量得 da = 16.5 mm,则 Q = da μP = 16.5 × 1 = 16.5 N (1分)
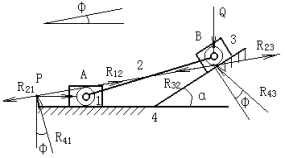
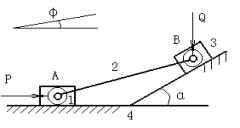 三、(共14分)在图示双滑块机构中,已知工作阻力 Q = 500 N,转动副 A、B 处摩擦圆及移动副中的摩擦角 φ 如图所示。试用图解法求出所需驱动力 P 。
三、(共14分)在图示双滑块机构中,已知工作阻力 Q = 500 N,转动副 A、B 处摩擦圆及移动副中的摩擦角 φ 如图所示。试用图解法求出所需驱动力 P 。
[ 规定 ]:取力比例尺μP = 10 N / mm 。
解:在机构图中画出各全反力。其中 R21(R12)、R23、(R32)各给2 分,R43 、R41 各给 1 分;
滑快1的力平衡方程: → → →
P + R21 + R 41 = 0
滑快3的力平衡方程: → → →
Q + R23 + R43 = 0
杆 AB 的力平衡方程: → →
R12 + R32 = 0
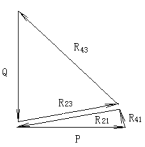
按 μP = 10 N / mm 分别画出滑快 1、3 的力多边形如图;
考虑到 R21 = - R12 ,R12 = - R32 , R32 = - R23
从力多边形图中量得 P = 10 × 40 = 400 N
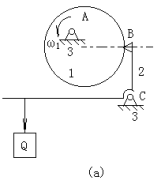
四、图(a)所示为一凸轮 - 杠杆机构,原动件凸轮 1 逆时针方向转动,通过从动件杠杆提起重量为 Q 的重物 。已知此机构运动简图是按长度比例尺 μL = 4 mm / mm画出的,重量 Q = 300 N 转动副 A 和 C 处的摩擦圆半径 ρ= 10 mm,高副接触点 B 处的摩擦角φ = 200 。试用图解法求出为提起重量 Q ,在凸轮 1上所需施加的主动力偶距 M1 的大小和方向。
解:杠杆 2 的力平衡方程为:
→ → →
Q + R32 + R12 = 0
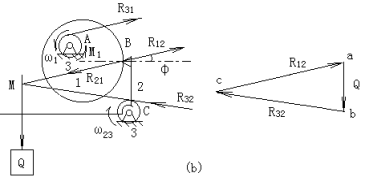 其中:Q 为工作阻力(已知); R12 为主动力,根据杠杆 2 在 B 点相对于凸轮 1 的滑动方向,可判定 R12 从法线方向向上偏转 φ 角,且与 Q 力相交于 M 点;因为杠杆 2 在凸轮 1 的推动下顺时针方向转动(如图中 ω23 所示),且 C 全反力 R32 的大致方向是从右指向左,所以 R32 应切于摩擦圆上方且通过汇交点 M。受力图如图(b)所示。取力比例尺μP = 20 N / mm 画出力三角形如图所示。
其中:Q 为工作阻力(已知); R12 为主动力,根据杠杆 2 在 B 点相对于凸轮 1 的滑动方向,可判定 R12 从法线方向向上偏转 φ 角,且与 Q 力相交于 M 点;因为杠杆 2 在凸轮 1 的推动下顺时针方向转动(如图中 ω23 所示),且 C 全反力 R32 的大致方向是从右指向左,所以 R32 应切于摩擦圆上方且通过汇交点 M。受力图如图(b)所示。取力比例尺μP = 20 N / mm 画出力三角形如图所示。
从而求得: R12 = ca μP = 28 × 20 = 560 N
R12 的反作用力 R21 作用在凸轮 1上,根据凸轮 1 的力平衡条件,在转动副 A 处应有一与 R21 大小相等、方向相反的全反力 R31 (与 R21 平行)。因ω1 为逆时针方向,故 R31 应切于摩擦圆的上方,如图所示。R21 和 R31 之间的垂直距离为 h1 ,它们形成一个顺时针方向的工作阻力距,则主动力偶距 M1 应与此阻力距大小相等、方向相反。考虑到 R12 = R21 = R3 = 560 N
故 M1 = R21 ×h1 ×μL = 560 ×11.5× 4 = 25760 N mm = 25.76 Nm
M1的方向为逆时针(与ω1 同向)。