习 题
0.1 简述工业机器人的定义,说明机器人的主要特征。
0.2 工业机器人与数控机床有什么区别?
0.3 工业机器人与外界环境有什么关系?
0.4 说明工业机器人的基本组成及三大部分之间的关系。
0.5 简述下面几个术语的含义:自由度、重复定位精度、工作原理、工作速度、承载能力。
0.6 什么叫冗余自由度机器人?
0.7 题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0������������������������1��������180��������,–90������������������������2��������180��������,画出该机械手的工作范围(画图时可以设L2=3 cm)。
0.8 工业机器人怎样按机械系统的基本结构来分类?
0.9 工业机器人怎样按控制方式来分类?
0.10 什么是SCARA机器人,应用上有何特点?
0.11 试总结机器人的应用情况。
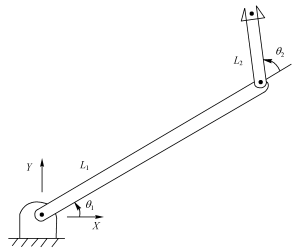
题0.7图
1.1 点矢量v为[10.00 20.00 30.00]T,相对参考系作如下齐次坐标变换:
写出变换后点矢量v的表达式,并说明是什么性质的变换,写出旋转算子Rot及平移算子Trans。
1.2 有一旋转变换,先绕固定坐标系Z0轴转45°,再绕其X0轴转30°,最后绕其Y0轴转60°,试求该齐次坐标变换矩阵。
1.3 坐标系{B}起初与固定坐标系{O}相重合,现坐标系{B}绕ZB旋转30°,然后绕旋转后的动坐标系的XB轴旋转45°,试写出该坐标系{B}的起始矩阵表达式和最后矩阵表达式。
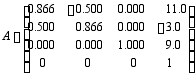
1.4 坐标系{A}及{B}在固定坐标系{O}中的矩阵表达式为
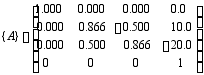
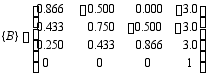
画出它们在{O}坐标系中的位置和姿态:
1.5 写出齐次变换矩阵![]() ,它表示坐标系{B}连续相对固定坐标系{A}作以下变换:
,它表示坐标系{B}连续相对固定坐标系{A}作以下变换:
(1) 绕ZA轴旋转90°。
(2) 绕XA轴转–90°。
(3) 移动[3,7,9]T。
1.6 写出齐次变换矩阵![]() ,它表示坐标系{B}连续相对自身运动坐标系{B}作以下 变换:
,它表示坐标系{B}连续相对自身运动坐标系{B}作以下 变换:
(1) 移动[3,7,9]T。
(2) 绕XB轴旋转90°。
(3) 绕ZB轴转– ��������90°。
1.7 题1.7图(a)所示的两个楔形物体,试用两个变换序列分别表示两个楔形物体的变换过程,使最后的状态如题1.7图(b)所示。
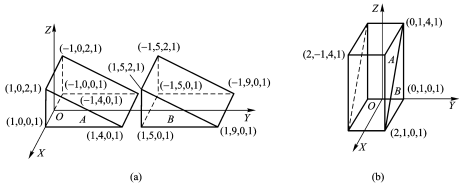
题1.7图
1.8 如题1.8图所示的二自由度平面机械手,关节1为转动关节,关节变量为��������1;关节2为移动关节,关节变量为d2。试:
(1) 建立关节坐标系,并写出该机械手的运动方程式。
(2) 按下列关节变量参数求出手部中心的位置值。
��������1 | 0° | 30° | 60° | 90° |
d2/m | 0.50 | 0.80 | 1.00 | 0.70 |
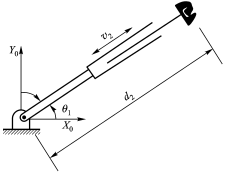
题1.8图
1.9 题1.8图所示二自由度平面机械手,已知手部中心坐标值为X0、Y0。求该机械手运动方程的逆解��������1、d2。
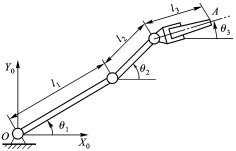
1.10 三自由度机械手如题1.10图所示,臂长为l1和l2,手部中心离手腕中心的距离为H,转角为��������1、��������2、��������3,试建立杆件坐标系,并推导出该机械手的运动学方程。
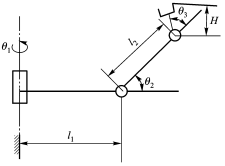
题1.10图
1.11 题1.11图所示为一个二自由度的机械手,两连杆长度均为1 ��������m,试建立各杆件坐标系,求出A1、A2及该机械手的运动学逆解。
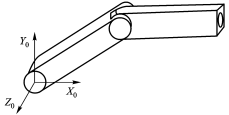
题1.11图
1.12 什么是机器人运动学逆解的多重性?
1.13 有一台如题1.13图所示的三自由度机械手的机构,各关节转角正向均由箭头所示方向指定,请标出各连杆的D-H坐标系,然后求各变换矩阵A1、A2、A3。
题1.13图
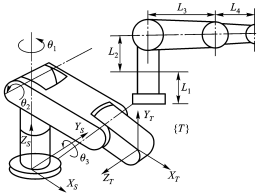
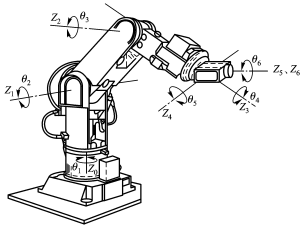
1.14 试按D-H坐标系建立题1.14图所示机器人各杆的坐标系(各Z轴正向位于有旋转标志一端,Z0、Z6如题1.14图所示)。
题1.14图
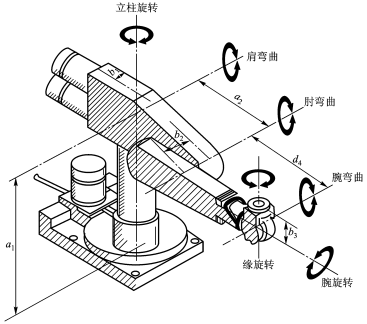
1.15 试求题1.15图所示V80机器人的运动学方程。
题1.15图
2.1 简述欧拉方程的基本原理。
2.2 简述用拉格朗日方法建立机器人动力学方程的步骤。
2.3 动力学方程的简化条件有哪些?
2.4 简述空间分辨率的基本概念。
2.5 机器人的稳态负荷的研究包括哪些内容?
2.6 简述计算机控制机器人获得良好的重复性的处理步骤。
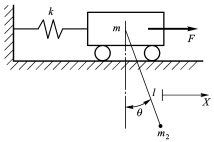
2.7 分别用拉格朗日动力学及牛顿力学推导题2.8图所示单自由度系统力和加速度的关系。假设车轮的惯量可忽略不计,X轴表示小车的运动方向。
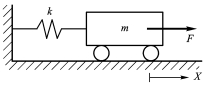
题2.8图
2.8 推导题2.8图所示两自由度系统的运动方程。
2.9 推导题2.9图所示的两自由度系统的运动方程。

题2.8图 题2.9图
2.10 用拉格朗日法推导题2.10图所示两自由度机器人手臂的运动方程。连杆质心位于连杆中心,其转动惯量分别为I1和I2。
2.11 简述机器人速度雅可比、力雅可比的概念及其二者之间的关系。
2.12 已知二自由度机械手的雅可比矩阵为
![]()
若忽略重力,当手部端点力F =[1 0]T时,求相应的关节力矩τ。
2.13 如题2.13图所示,一个三自由度机械手,其末端夹持一质量m=10 kg的重物,l1=l2=0.8 m,θ1=60°,θ2= –60°,θ3= –90°。若不计机械手的质量,求机械手处于平衡状态时的各关节力矩。
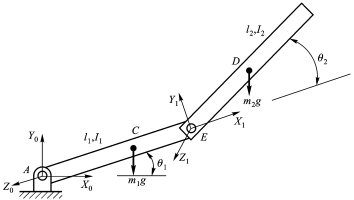
题2.10图
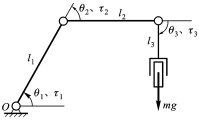
题2.13图 三自由度机械手
2.14 如题2.14图所示二自由度机械手,杆长l1=l2=0.5 m,求下面三种情况时的关节瞬时速度![]() 、
、![]() 。
。
vX/(m/s) | –1.0 | 0 | 1.0 |
vY/(m/s) | 0 | 1.0 | 1.0 |
�������� 1 | 30° | 30° | 30° |
�������� 2 | –60° | 120° | –30° |
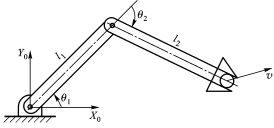
题2.14图 二自由度机械手
2.15 如题2.15图所示三自由度平面关节机械手,其手部握有焊接工具,若已知各个关节的瞬时角度及瞬时角速度,求焊接工具末端A的线速度vX、vY。
题2.15图 三自由度平面关节机械手
3.1 何谓轨迹规划?简述轨迹规划的方法并说明其特点。
3.2 设一机器人具有6个转动关节,其关节运动均按三次多项式规划,要求经过两个中间路径点后停在一个目标位置。试问欲描述该机器人关节的运动,共需要多少个独立的三次多项式?要确定这些三次多项式,需要多少个系数?
3.3 单连杆机器人的转动关节,从�������� = –5°静止开始运动,要想在4 s内使该关节平滑地运动到�������� =+80°的位置停止。试按下述要求确定运动轨迹:
(1) 关节运动依三次多项式插值方式规划。
(2) 关节运动按抛物线过渡的线性插值方式规划。
3.4 目前有哪几种模型应用于机器人系统构型?各自有何优、缺点?
4.1 机器人本体主要包括哪几部分?以关节型机器人为例说明机器人本体的基本结构和主要特点。
4.2 如何选择机器人本体的材料,常用的机器人本体材料有哪些?
4.3 何谓材料的E/��������?为提高构件刚度选用材料E/��������大些还是小些好,为什么?
4.4 机身设计应注意哪些问题?
4.5 何谓升降立柱下降不卡死条件?立柱导套为什么要有一定的长度?
4.6 机器人臂部设计应注意哪些问题?
4.7 常用的臂杆平衡方法有哪几种?试述质量平衡常用的平行四边形平衡机构。
4.8 什么叫BBR手腕、RRR手腕?什么叫手腕自由度退化?
4.9 机器人手爪有哪些种类,各有什么特点?
4.10 试述磁力吸盘和真空吸盘的工作原理。
4.11 何谓自适应吸盘及异形吸盘?
4.12 机器人对移动关节有何要求?为什么常用滚动导轨?
4.13 机器人专用滚动轴承有何特点?机器人为什么要采用谐波传动?
4.14 传动件定位常有哪几种方法?
4.15 传动件消隙常有哪几种方法,各有什么特点?
4.16 简述机器人行走机构结构的基本形式和特点。
4.17 简述两足步行机器人行走机构的工作原理。
5.1 说明工业机器人常用的控制结构形式,就你所熟知的某种工业机器人分析其控制器的控制结构。
5.2 机器人传感器常用的有哪几种?
5.3 传感器的主要性能参数有哪几个?
5.4 简述电位式位移传感器的工作原理。
5.5 分析二进制吗盘与格雷吗盘结构的异同。
5.6 角速度传感器常用的有哪几种?举例说明其中一种的工作原理。
5.7 分析外部传感器中力矩传感器的测量原理。
5.8 简述触觉传感器的测量原理。
5.9 采用基于芯片的运动控制器来控制机器人的运动有什么特点?
5.10 LM628芯片有什么功能?
5.11 分析运动控制卡控制的结构特点?举例说明你所了解的运动控制卡的应用。
5.12 步进电机具有哪些优点?说明反应式步进电机的工作原理。
5.13 MOTOMAN-UP6型机器人的控制器XRC有哪些控制功能?
5.14 分析XRC外部控制功能的作用及应用。
5.15 何为分解运动控制?为什么要进行分解运动控制?
5.16分解运动控制的思路及实现方法是什么?
5.17 分解运动加速度控制的目标是什么?怎么实现?