第十章 齿轮系及其设计
一、选择题
1.轮系可以分为_____D___两种类型。
A.定轴轮系和差动轮系 B.差动轮系和行星轮系
C.定轴轮系和复合轮系 D.定轴轮系和周转轮系
2.差动轮系的自由度为____B_____。
A.1 B.2 C.3 D.4
3.行星轮系的自由度为___A_______。
A.1 B.2 C.3 D.4
4.在定轴轮系中,设轮1为起始主动轮,轮N为最末从动轮,则定轴轮系始末两轮传动比数值计算的一般公式是i1n=____A_____。
A.轮1至轮N间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积
B.轮1至轮N间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积
C.轮N至轮1间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积
D.轮N至轮1间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积
5.在运用反转法解决周转轮系传动比的计算问题时,下列公式中_____A__是正确的。
A.iHmn=(nm—nH)/(nn—nH) B.iHmn=(nn—nH)/(nm—nH)
C.iHmn=(nH—nn)/(nm—nn) D.iHmn=(nm—nn)/(nn—nH)
6.基本周转轮系是由___C____构成。
A.行星轮和中心轮 B.行星轮、惰轮和中心轮
C.行星轮、行星架和中心轮 D.行星轮、惰轮和行星架
7.下列四项功能中,哪几项___C___可以通过轮系的运用得以实现。
两轴的较远距离传动 变速传动
获得大的传动比 实现合成和分解运动
A. B. C. D.
二、判断题
1、定轴轮系的传动比数值上等于组成该轮系各对啮合齿轮传动比的连乘积
2、周转轮系的传动比等于各对齿轮传动比的连乘积。X
3、轮系可以分为定轴轮系和周转轮系,其中,差动轮系属于定轴轮系。X
4、在行星轮系中,可以有两个以上的中心轮能转动。X
5、在蜗轮蜗杆传动中,蜗轮的转向不仅与蜗杆的转向有关,而且与其螺旋线方向有关。
6、在周转轮系中,行星架与中心轮的几何轴线必须重合,否则便不能转动。
7、在定轴轮系中,传动比的大小等于各对啮合齿轮中所有从动轮齿数的连乘积与所有 8、主动轮齿数的连乘积之比。
9、当两轴之间需要很大的传动比时,必须通过利用多级齿轮组成的定轴轮系来实现。在轮系中,合成运动和分解运动都可以通过差动轮系来实现。
10、在齿轮传动中计算中,整个复合轮系能转化成一个定轴轮系,所以用一个公式即可求解。X
1、平面定轴轮系传动比的大小等于 ________;从动轮的回转方向可用 _________方法来确定。
2、所谓定轴轮系是指__ _。
3、所谓周转轮系是指_ 。
4、蜗轮的转向不仅与___________的转向有关,而且与其_ _方向有关。
5、差动轮系的自由度是__________,行星轮系的自由度是_____________。
6、基本周转轮系是由_____________、_____________、______________组成。
7、在复合轮系传动比计算中,应正确区分各个轮系,其关键在于_ _。
8、在周转轮系传动比计算中,运用相对运动的原理,将周转轮系转化成假想的定轴轮系方法称为_ _________________。
9、汽车后桥差速器是作为_ __分解运动的应用。
四.解答题
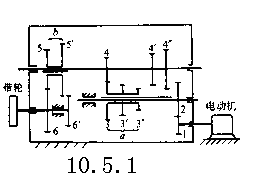
10.5.1在题图10.1.1所示的车床变速箱中,已知各轮齿数为z1=42,z2=58,z3’=38,z4’=42,z5’=50,z6’=48,电动机转速为1450r/min.若移动三联滑移齿轮a使齿轮3’和4’啮合,又移动双联滑动齿轮b使齿轮5’和6’啮合,试求此时带轮转速的大小和方向.
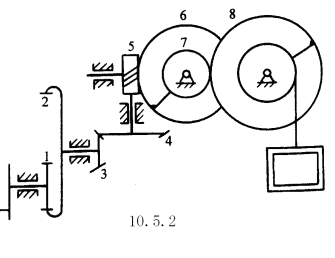
10.5.2.在题图4-2所示的手摇提升装置中,已知各轮齿数为z1=20,z2=50,z3=15,z4=30,z6=40,z7=18,z8=51,蜗杆z5=1为右旋,试求传动比i18并确定提升重物时的转向.
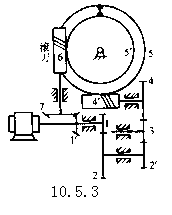
10.5. 3.图10.5.3所示为一滚齿机工作台的传动机构,工作台与蜗轮5相固联.已知z1=z1’=20,z2=35,z4’=20(右旋),z5=40,滚刀z6=(左旋),z7=28。若加要工一个z5’=64的齿轮,试决定交换轮组各轮的齿数z2’和z4 。
10.5.4.在题图10.5.4所示的传动装置中,螺杆4和5是一对旋向相反的单线螺杆,其螺距分别为3mm和2.5mm,螺杆5旋在螺杆4内,螺杆4旋在框架上.齿轮1和1’是固联在手轮转轴上的双联齿轮,齿轮2与螺杆5固联在一起,齿轮3与螺杆4固联在一起.已知各轮齿数:z1=20,z1’=26,z2=44,z3=38,试确定当手轮按图示方向转动一周时,x,y的大小和方向变化.

第十章 齿轮系及其设计
习题解答
一、选择题
1、D 2、B 3、A 4、A 5、A 6、C 7、C
二、判断题(答A表示说法正确.答B表示说法不正确)
1、( A ) 2、( B ) 3、( B ) 4、( B ) 5、( A )
6、( A ) 7、( A ) 8、( A ) 9、( A ) 10( B )
三、填空题
1、组成该轮系的各对啮合齿轮的传动比的连乘积,标注箭头
2、各个齿轮的轴线相对于机架的位置都是固定的轮系
3、至少有一个齿轮的轴线位置不固定
4、蜗杆,旋向
5、2,1
6、行星轮,中心轮,行星架
7、把周转轮系找出来
8、反转固定转臂法
9、差动轮系
四、分析计算题
10.5.1解:此轮系为定轴轮系.
I16’=n1/n6’=(-1)3z2×z4’×z6’/z1×z3’×z5’
=-58×42×48/42×38×50=-29×24/19×25=-1.46
∴n6’=-n1×19×25/29×24=-990r/min
带轮的转速方向与电机相反.

10.5.2.
答案:此轮系为定轴轮系.
I18=n1/n8=z4×z5×z6×z8/z1×z3×z5×z7=50×30×40×51/20×15×1×18≈722.22
10.5.3.
答案:由定轴轮系组成。均从电机出发,一条传动线路为1’、7、6、.而另一条传动线路为1、2、2’、3、4、4’、5’ 。且5与5’ 固联在一起,即其转速相同。
∴i1’5=i15
即z7×z5’/z1’×z6=z2×z3×z4×z5/z1×z2’×z3×z4’ 代如已知各齿数,
得z4=1.28z2’
齿数应为整数,且要满足上述条件.
![]() ∴ z2’, z4的齿数取
∴ z2’, z4的齿数取
z2’=25,50,100……
z4=32,64,128……
从体积的角度出发,现取z2’=25,z4=32。
10.5.4.
答案:4和5的旋向相反,现作如下假定:
①设4为右旋,5为左旋
按图示转动时,则2,3齿轮转向的箭头朝上.
4为右旋,则其相对于机架向左运动,其运动距离:S4=3n3=3z3/z1=51/13mm.
5为左旋,其相对于4向右移动,其相对于4移动的距离:S5=2.5n2=2.5z2/z1=5.5mm.
∴x=51/13mm,向左移
y=5.5+51/13≈8.41mm,向右移
②设4为左旋,5为右旋
则4相对于机架向右运动,其运动距离:S4=3n3=51/13mm.
5相对于4向左移动,其相对于4移动的距离:S5=5.5mm.
∴x=51/13mm,向右移
y=5.5-51/13≈1.59mm,向左移