空间力系是物体受力最普遍和最一般的情形。本章研究空间力系简化和平衡两个基本问题,所涉及到的基本原理和方法仅是平面力系的进一步推广。
§4-1 空间汇交力系
1.力在直角坐标上的投影
 (1)一次(直接)投影法
(1)一次(直接)投影法
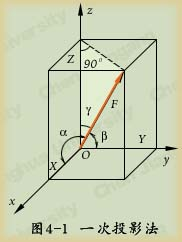
如已知力 与正交坐标系各轴的夹角分别为
与正交坐标系各轴的夹角分别为 、
、 、
、 ,如图4-1所示。则力在坐标轴上的投影等于
,如图4-1所示。则力在坐标轴上的投影等于
 (4-1)
(4-1)
(2)二次(间接)投影法
如图4-2所示,将力 先投影到某一坐标平面,例如
先投影到某一坐标平面,例如 平面,得力
平面,得力 ,再将此力投影到
,再将此力投影到 轴上。得到
轴上。得到
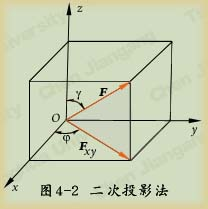
 (4-2)
(4-2)
例4-1半径 的斜齿轮,其上作用力
的斜齿轮,其上作用力 ,如图4-3(a)所示。求力
,如图4-3(a)所示。求力 在坐标轴上的投影。
在坐标轴上的投影。
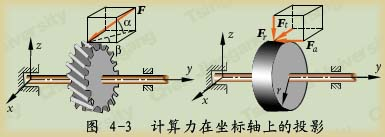
解:用二次投影法求力 在坐标轴上的投影,由图(b)得
在坐标轴上的投影,由图(b)得
 (圆周力)
(圆周力)
 (轴向力)
(轴向力)
 (径向力)
(径向力)
如已知力在坐标轴上的投影 、
、 、
、 ,可按下式决定力的大小和方向余弦:
,可按下式决定力的大小和方向余弦:
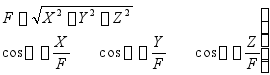 (4-3)
(4-3)
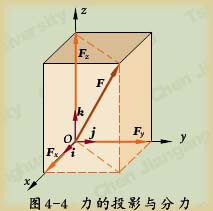 (3)力的投影与分力
(3)力的投影与分力
如图4-4所示,力 沿直角坐标轴的正交分量与其投影之间有如下关系:
沿直角坐标轴的正交分量与其投影之间有如下关系:
 (4-4)
(4-4)
2.空间汇交力系的合成与平衡条件
(1) 合成
由第二章已知,汇交力系合成为通过汇交点的一个合力,合力矢
 (4-5)
(4-5)
由式(4-4)可得
 (4-6)
(4-6)
合力的大小和方向余弦分别为
 (4-7)
(4-7)
(2)平衡条件
空间汇交力系平衡的必要和充分条件是:力系的合力等于零,即

其平衡方程式为
 (4-8)
(4-8)
即:力系中各力在坐标轴上投影的代数和分别等于零。
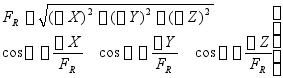
 例4-2 起吊装置如图4-5(a)所示,起重杆
例4-2 起吊装置如图4-5(a)所示,起重杆 端用球铰链固定在地面上,
端用球铰链固定在地面上, 端则用绳
端则用绳 和
和 拉住,两绳分别系在墙上的点
拉住,两绳分别系在墙上的点 和
和 ,连线
,连线 平行于
平行于 轴。若已知
轴。若已知 ,
, ,
, ,如图(b)所示,物重
,如图(b)所示,物重 。不计杆重,试求起重杆所受的压力和绳子的拉力。
。不计杆重,试求起重杆所受的压力和绳子的拉力。
解:取起重杆 与重物为研究对象,受力如图(a)。由已知条件可知,
与重物为研究对象,受力如图(a)。由已知条件可知, 建立图示坐标系,由平衡方程
建立图示坐标系,由平衡方程



解得 

 为正值,表明所设
为正值,表明所设 的方向正确,
的方向正确, 为压杆。
为压杆。
 §4-2 力对轴之矩和力对点之矩
§4-2 力对轴之矩和力对点之矩
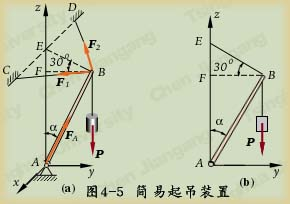
1.力对轴之矩
力对轴之矩是力使物体绕某轴转动效果的度量。平面力系中,力对点之矩为力对通过该点且垂直于力系所在平面的某轴的矩。
(1)定义
如图4-6 (a)所示。力 对
对 轴的矩等于该力在与
轴的矩等于该力在与 轴垂直的平面上的投影
轴垂直的平面上的投影 对轴与平面交点之矩。有
对轴与平面交点之矩。有

力对轴之矩是代数量,表示力矩的大小和转向,并按右手规则确定其正负号,如图4-6b所示,拇指指向与 轴一致为正,反之为负。
轴一致为正,反之为负。
力与轴平行或相交时,力对该轴的矩等于零。
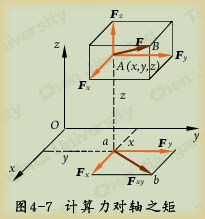 (2)力对轴之矩的解析式
(2)力对轴之矩的解析式
如图4-7所示, ,
, ,
, 和
和 、
、 、
、 分别为力在坐标轴上投影和力作用点的坐标。由合力矩定理得到
分别为力在坐标轴上投影和力作用点的坐标。由合力矩定理得到
 (4-9)
(4-9)
式中各量均为代数量。
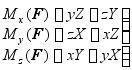
2.力对点之矩
 力对点之矩是 力使物体绕某点转动效果的度量。在平面力系中,力对点之矩为一代数量。但对空间力系,除了力矩的大小和转向,还必须表明力的作用线与矩心所在的平面在空间的方位。三者可用一个矢量表示,记为
力对点之矩是 力使物体绕某点转动效果的度量。在平面力系中,力对点之矩为一代数量。但对空间力系,除了力矩的大小和转向,还必须表明力的作用线与矩心所在的平面在空间的方位。三者可用一个矢量表示,记为 。如图4-8所示。矢量的指向按右手规则确定,有
。如图4-8所示。矢量的指向按右手规则确定,有
 (4-10)
(4-10)
由式4-10及图4-8可知
(1)力对点之矩依赖于矩心的位置,是一个定位矢量。
(2)力矩的大小

(3)力对点之矩的解析式为

 (4-11)
(4-11)
3.力对点之矩与力对轴之矩的关系
将式(4-11)投影到三个坐标轴上,得(4-12)
 (4-12)
(4-12)
比较式(4-12)与式(4-9),可知:力对点之矩在通过该点的某轴上的投影等于力对该轴之矩。式(4-11)可表为
 (4-13)
(4-13)
参照式(4-6)和式(4-7),由上式可进一步得到力对点 之矩的大小和方向余弦。
之矩的大小和方向余弦。
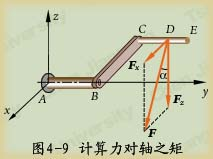
例4-3 手柄 在平面
在平面 内,在
内,在 处作用一个力
处作用一个力 ,如图4-9所示,它在垂直于
,如图4-9所示,它在垂直于 轴的平面内,偏离铅直线的角度为。如
轴的平面内,偏离铅直线的角度为。如 ,杆
,杆 平行于
平行于 轴,杆
轴,杆 平行于
平行于 轴,
轴, 和
和 的长度都等于
的长度都等于 。试求力
。试求力 对
对 、
、 和
和 三轴之矩。
三轴之矩。
解:将力F沿坐标轴分解为 和
和 两个分力,其中
两个分力,其中 ,
, 。
。
 注意到力与轴平行或相交时对该轴之矩为零,由合力矩定理,有
注意到力与轴平行或相交时对该轴之矩为零,由合力矩定理,有





下面再用力对轴之矩的解析式计算。力 在
在 、
、 、
、 轴上的投影为
轴上的投影为

力作用点 的坐标为
的坐标为 ,按式(4-9)
,按式(4-9)
得 


两种计算方法结果相同。
§4-3 空间力偶系
⒈力偶矩矢
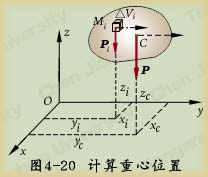
如图4-10所示。空间力偶的作用面可以平行移动而不改变力偶对物体的作用。因此,空间力偶对物体的作用决定于力偶三要素:
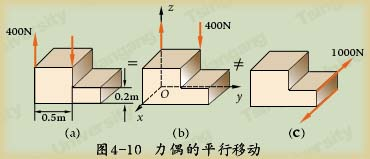
力偶矩的大小;力偶作用面在空间的方位;力偶在作用面内的转向。
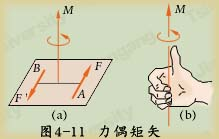 力偶三要素可用一个矢量表示,称为力偶矩矢,记作
力偶三要素可用一个矢量表示,称为力偶矩矢,记作 ,如图4-11所示。矢的长度表示力偶矩的大小,矢的方位垂直力偶作用面,矢的指向与力偶转向间的关系服从右手规则。力偶矩矢是自由矢量。
,如图4-11所示。矢的长度表示力偶矩的大小,矢的方位垂直力偶作用面,矢的指向与力偶转向间的关系服从右手规则。力偶矩矢是自由矢量。
力偶对刚体的作用完全决定于力偶矩矢。
2.力偶等效条件
若两力偶的力偶矩矢相等,则两力偶等效。
3.空间力偶系的合成与平衡条件
(1)力偶系的合成
空间力偶系可合成为一个合力偶,合力偶矩矢等于分力偶矩矢的矢量和,即
 (4-14)
(4-14)
将上式向 、
、 轴投影,有
轴投影,有
 (4-15)
(4-15)
则
 (4-16)
(4-16)
由上式可进一步计算合力矩的大小和方向余弦。
(2)平衡条件
空间力偶系平衡的必要和充分条件是:各分力偶矩矢的矢量和等于零。
即
 (4-17)
(4-17)
平衡方程为
 (4-18)
(4-18)
即各力偶矩矢在三个坐标轴上投影的代数和分别等于零。三个独立的平衡方程,可解三个未知量。
§4-4 空间任意力系向一点简化·主矢和主矩
1.力系向一点简化·主矢和主矩
应用力的平移定理,将力系中各力向任意简化中心 平移,得到与原力系等效的空间汇交力系和空间力偶系,如图4-12(a),(b),再进一步合成这两个力系,得到一个力和一个偶。如图4-12(c)所示。力矢和力偶矩矢分别为
平移,得到与原力系等效的空间汇交力系和空间力偶系,如图4-12(a),(b),再进一步合成这两个力系,得到一个力和一个偶。如图4-12(c)所示。力矢和力偶矩矢分别为
 (4-19)
(4-19)
 (4-20)
(4-20)
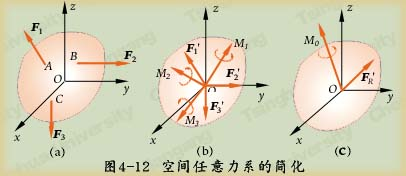
和平面力系一样,力系中各力的矢量和 称为力系的主矢量,各力对简化中心之矩的矢量和
称为力系的主矢量,各力对简化中心之矩的矢量和 称为力系对简化中心的主矩。
称为力系对简化中心的主矩。
由此得如下结论:
空间任意力系对向任选点简化,可得一力和一力偶。力的大小、方向等于力系的主矢量,作用线通过简化中心;而力偶的矩矢等于力系对简化中心的主矩。主矢与简化中心位置无关,主矩则与简化中心位置有关。
可通过式(4-6)和式(4-13)计算力系的主矢和主矩。
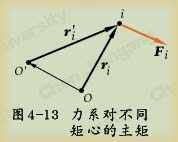 2.力系对不同简化中心的主矩
2.力系对不同简化中心的主矩
如图4-13所示。力系对简化中心 和
和 的主矩分别为
的主矩分别为

而 

得  (4-21)
(4-21)
即力系对 点的主矩等于对
点的主矩等于对 的主矩与加在的主矢对
的主矩与加在的主矢对 点的矩之和。
点的矩之和。
§4-5 空间任意力系的简化结果分析
⒈力系的简化结果
力系向任一点简化的结果及简化的最后结果如表1所示。
表4-1 力系简化结果
力系向任一点 简化的结果 简化的结果 | 力系简化的 最后结果 | 说 明 |
主矢 | 主 矩 |

|   | 平衡 | 平衡力系 |
  | 合力偶 | 主矩与简化中心的位置无关 |

|  | 合力 | 合力作用线通过简化中心 |

|  ⊥ ⊥
(图4-14) | 合力 | 合力作用线离简化中心 的距离 的距离 |

| 
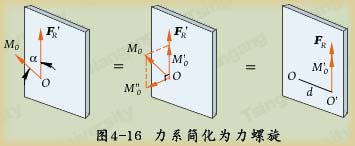
图4-15 | 力螺旋 | 力螺旋的中心轴通过简化中心 |
 与 与
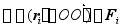
成 角 角 (图4-16) | 力螺旋 | 力螺旋的中心轴离简化中心 的距离 的距离 |
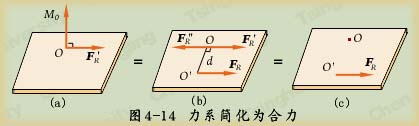
空间任意力系简化的最后结果有四种情形:合力、合力偶、力螺旋和平衡。
2.合力矩定理的一般形式
由图4-14可知
又由式(4-20)
有
得
 (4-22)
(4-22)
将上式投影到通过 点的任一轴
点的任一轴 上
上
有
 (4-23)
(4-23)
式(4-22)和(4-23)是最一般情况的合力矩定理。即合力对任一点之矩矢等于力系中各力对该点之矩矢的矢量和;合力对任一轴之矩等于力系中各力对该轴之矩的代数和。
§4-6 空间任意力系的平衡方程
空间任意力系平衡的必要和充分条件是:力系的主矢和对任一点的主矩都等于零,即


平衡的解析条件为
 (4-24)
(4-24)
即空间任意力系平衡的必要和充分条件是:力系中各力在三个坐标轴上投影的代数和分别等于零,各力对每个轴之矩的代数和也等于零。
六个独立的平衡方程,解6个未知量。
例4-4图4-17所示的三轮小车,自重 ,作用于点
,作用于点 ,载荷
,载荷 作用于点
作用于点 。求小车静止时地面对车轮的约束力。
。求小车静止时地面对车轮的约束力。
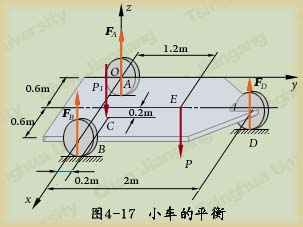
解:取小车为研究对象,受力如图4-17所示。5个力构成空间平行力系。建立图示坐标系 ,由平衡方程
,由平衡方程



解得 


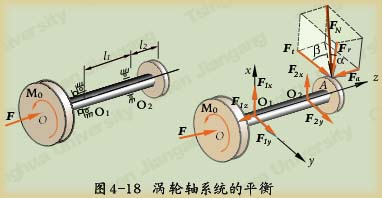
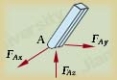
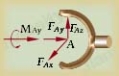
例4-5 如图4-18所示涡轮发动机叶片受到的燃气压力可简化为作用在涡轮盘上的一个轴向力和一个力偶。已知:轴向力 ,力偶矩
,力偶矩 。斜齿的压力角
。斜齿的压力角 ,螺旋角
,螺旋角 ,齿轮节圆半径
,齿轮节圆半径 。轴承间距离
。轴承间距离 ,径向轴承
,径向轴承 与斜齿轮间的距离
与斜齿轮间的距离 。不计发动机自重。试求斜齿轮上所受的作用力
。不计发动机自重。试求斜齿轮上所受的作用力 及推力轴承
及推力轴承 和径向轴承
和径向轴承 的约束力。
的约束力。
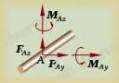
解:取图示涡轮轴系统为研究对象,系统受力图及坐标系 如图4-18所示,其中推力轴承
如图4-18所示,其中推力轴承 的约束力有三个分量,径向轴承
的约束力有三个分量,径向轴承 的约束力有两个分量。斜齿轮所受的压力
的约束力有两个分量。斜齿轮所受的压力 可分解成三个分量:周向力
可分解成三个分量:周向力 、径向力
、径向力 和轴向力
和轴向力 。各分力的大小与有
。各分力的大小与有
 (a)
(a)
 (b)
(b)
 (c)
(c)
系统受空间力系作用,由平衡方程

 ①
①

 ②
②

 ③
③

 ④
④

 ⑤
⑤

 ⑥
⑥
由上式解得 ,代入式(a)得
,代入式(a)得

代入式(b)和式(c),得


将所求各值分别代入③、④、⑤、①和②得






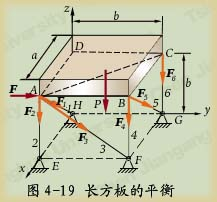 例4-6 图4-19所示均质方板由六根杆支撑于水平位置,直杆两端各用球铰链与扳和地面连接。板重为
例4-6 图4-19所示均质方板由六根杆支撑于水平位置,直杆两端各用球铰链与扳和地面连接。板重为 ,在
,在 处作用一水平力,且
处作用一水平力,且 ,不计杆重。求各杆的内力。
,不计杆重。求各杆的内力。
解:取方板为研究对象。设各杆均受拉力。板的受力如图所示。由平衡方程

得  (压力)
(压力)



得 

得  (拉力)
(拉力)

得  (压力)
(压力)
此例中用6个力矩方程求6根杆的内力。一般,力矩方程比较灵活,常可使一个方程只含一个未知数。当然也可以采用其他形式的平衡方程求解。例如,四矩式,五矩式。但独立的平衡方程数只有6个。由于空间情况比较复杂,这里就不讨论其独立性条件。
§4-7 约束和约束力综述
常见的各种类型的约束和约束力列于表4-2中
表4-2 各种约束类型和约束反力
一、平面问题
约束类型 | 约束力 | 未知量数 目 |
| 
| 1 |

| 
| 1 |

| 
| 2 |
  
| 
| 2 |

| 
| 2 |
| 
| 3 |
二、空间问题
§4-8 重心
1.重心概念及其坐标公式
(1)重心 物体各部分所受重力的合力的作用点称为物体的重心。
(2)重心坐标公式 如将重为 的物体分成许多体积为
的物体分成许多体积为 ,重为
,重为 的微块,有
的微块,有 。取图4-20坐标系,重心
。取图4-20坐标系,重心 及微块坐标如图示。由合力矩定理得重心坐标公式:
及微块坐标如图示。由合力矩定理得重心坐标公式:


 (4-24)
(4-24)
若物体是均质的,其重心位置只决定于物体的体积和形状。重心与物体的几何中心重合,后者称为形心。均质物体的形心坐标公式见表4-3(见下页)。
表4-3 均质物体的形心
式中 、
、 、
、 分别为物体(微块)的体积、面积和长度。
分别为物体(微块)的体积、面积和长度。
2.确定物体重心位置的方法
(1)对称物体 具有对称面、对称轴和对称中心的形状规则的均质物体,其重心一定在对称面、对称轴和对称中心上。各种简单形体的重心坐标公式列于表4-4中。
(2)组合物体 常用分割法或负面积法确定重心位置。即将组合物体分成若干形状简单、重心位置易求出的物体,由式(4-24)求解。
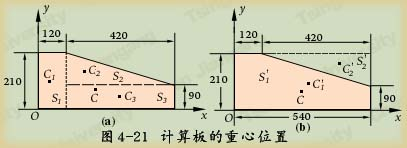
例4-6 求图4-21(a)所示的均质薄板的重心位置,图中长度单位为 。
。
解:作固连于薄板的坐标系如图所示。
[解法一]用分割法求重心位置 整块薄板可看成是由虚线所划分的 、
、 、
、 三部分组成。以
三部分组成。以 代表面积
代表面积 的重心的坐标,则
的重心的坐标,则


由式(4-24)得整块薄板重心 的坐标
的坐标
[解法二] 用负面积法求重心位置 把板看成长方形 割去虚线所示三角形
割去虚线所示三角形 而成(图4-21b),将割区的面积
而成(图4-21b),将割区的面积 看作负值,先求出各部分的面积和重心坐标
看作负值,先求出各部分的面积和重心坐标

薄板的重心 的坐标
的坐标
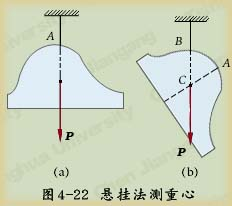
(3)重心位置的测定 不规则物体的重心位置常由实验测定。一般采用悬挂法和称重法。
 悬挂法 如图4-22所示。按一定比例作成模拟物体(如水坝)的截面,通过两悬挂点
悬挂法 如图4-22所示。按一定比例作成模拟物体(如水坝)的截面,通过两悬挂点 、
、 的铅垂线的交点即为物体重心。
的铅垂线的交点即为物体重心。
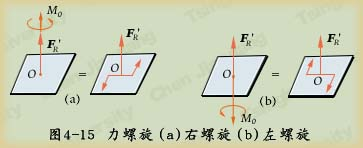
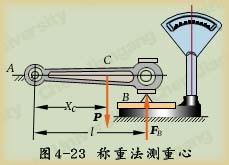
称重法 如图4-23所示。为确定具有对称轴的内燃机连杆的重心坐标 ,先称出连杆重量
,先称出连杆重量 ,然后将其一端支承于
,然后将其一端支承于 点,另一端放在磅秤
点,另一端放在磅秤 上。测得两支点的水平距离
上。测得两支点的水平距离 及处约束力
及处约束力 。由平衡方程
。由平衡方程


得 
表4-4 简单形体重心坐标公式
图形 | 重心位置 |
三角形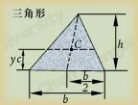 | 在中线的交点 
|
梯形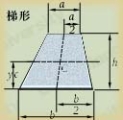 | 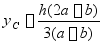
|
圆弧 | 
对于半圆弧 ,则 ,则 
|
弓形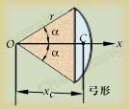 | 
[面积 ] ] |
扇形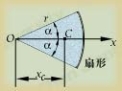 | 
对于半圆 ,则 ,则 |
部分圆环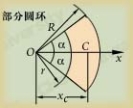 | 
|
抛物线面 | 

|
续表
图形 | 重心位置 |
抛物线面 | 

|
半圆球 | 
|
正圆锥体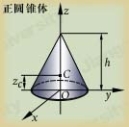 | 
|
正角锥体 | 
|
锥形筒体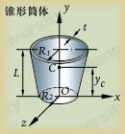 | 
|